MADDPG[1]、MATD3、MAPPO[2]与PMPO的异同
MADDPG、MATD3、MAPPO与PMPO四种算法都是“多智能体强化学习”的不同做法,可以把它们理解成为同一个目标下的四种“学习风格”。
一、共同目标
举一个简单的例子 几个小机器人在一起搬箱子,每个机器人都能看到一部分环境,却不知道别人怎么想,它们必须一起完成任务,但每个机器人都在“自私地”学自己的策略,因此整个环境总是在变,学习容易不稳定。
这四个算法都是用来解决这个核心问题:多智能体一起学习,但环境因为大家同时变化而变得很难学。
四者的共同点有:
- 都属于多智能体强化学习,适用于多个智能体共同完成任务;
- 都采用集中训练、分散执行的方式。训练时共享一些信息,执行时各自独立;
- 都试图让学习过程稳定,避免“你变我变大家都变导致学不会”的情况
二、四个算法的直观区别
1. MADDPG
- 比喻:MADDPG就像每个学生都用自己的笔记(actor),但考试时老师(critic)会告诉每个学生“我看到了全班人的答案,你这个答案好不好”,所以其比单独学习更稳定;
- 技术特点:是DDPG[3]的多智能体版本,适合连续动作问题,比如机器人控制;
- 优点:容易理解,容易实现,比单智能体更稳定;
- 缺点:DDPG本身不太稳定,训练容易受超参数影响。
2. MATD3
- 比喻:比MADDPG更聪明的学生。他知道“老师可能偏心,把分数打高了”,于是引入两个老师(双Q值)同时评分,让分数更真实,从而学习更稳;
- 技术特点:是TD3[4]的多智能体版本,因此比MADDPG大幅提升稳定性;
- 优点:比MADDPG更稳,更不容易学炸;
- 缺点:仍然属于确定性策略,探索不如随机策略。
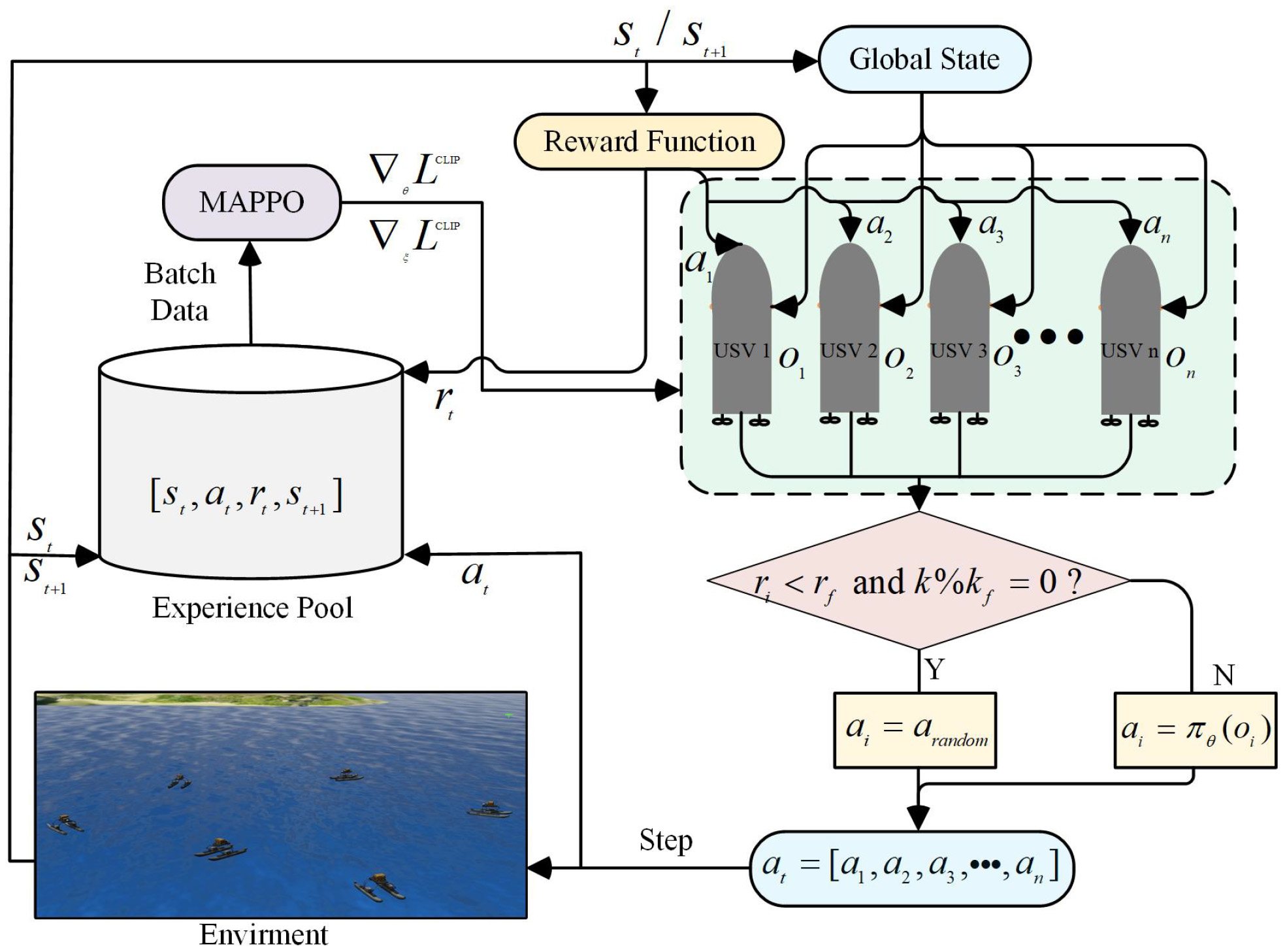
3. MAPPO
- 比喻:这群学生的学习方式变了,不是去猜正确答案,而是“学习一套概率分布”,让自己的行为更有弹性,并利用“概率裁剪”(防止更新太猛)保持稳定;
- 技术特点:基于PPO[5]的多智能体方法,现在非常流行;
- 优点:非常稳定,特别适合大规模智能体,比如多人对抗游戏、交通调度等;
- 缺点:在某些高精度连续控制任务的样本效率不如TD3/MATD3。
4. PMPO
- 比喻:这群学生不光学习自己的策略,它们还学习“大家之间如何协作的概率关系”,有点像研究团队合作模式的学生,把协作结构建模得更细;
- 技术特点:基于策略梯度,重点在于“建模智能体之间的协作概率结构”;
- 优点:更强的协同能力,更适合复杂任务;
- 缺点:计算复杂度比较高,不如MAPPO那样广泛使用。
三、总结
按学习方式分类:
- 确定性策略方法:MADDPG和MATD3
- 随机策略方法:MAPPO和PMPO
- 最稳定:MATD3和MAPPO
- 较不稳定:MADDPG
- 稳定但复杂度高:PMPO
MADDPG:多智能体版 DDPG,简单但不够稳。
MATD3:加强版 MADDPG,更稳定。
MAPPO:多智能体 PPO,最稳定使用最广。
PMPO:建模协作结构更强,但更复杂。
相对应的应用背景:
- 机器人或物理控制类:MATD3。
- 游戏对抗、多智能体协作:MAPPO。
- 新颖的研究、强化智能体协作结构:PMPO。
- 简单跑通一个demo:MADDPG 或 MAPPO
- Lowe R, Wu Y I, Tamar A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[J]. Advances in neural information processing systems, 2017, 30.
- Yu C, Velu A, Vinitsky E, et al. The Surprising Effectiveness of PPO in Cooperative Multi-Agent Games[C]//Thirty-sixth Conference on Neural Information Processing Systems Datasets and Benchmarks Track.
- Lillicrap T P, Hunt J J, Pritzel A, et al. Continuous control with deep reinforcement learning[J]. arXiv preprint arXiv:1509.02971, 2015.
- Fujimoto S, Hoof H, Meger D. Addressing function approximation error in actor-critic methods[C]//International conference on machine learning. PMLR, 2018: 1587-1596.
- Schulman J, Wolski F, Dhariwal P, et al. Proximal policy optimization algorithms[J]. arXiv preprint arXiv:1707.06347, 2017.